
Add:Room 301, Building 3, No.138 Xinjun Huan Road, Pujiang Town, Minhang District, Shanghai
Tel:021-34637140
E-mail:support@kezhi-electric.com
Fax:021-50786976-603
Service Hotline:
+86-21-34637140
Shanghai Kezhi Electric Automation Co., Ltd All
Right 沪ICP备17001713号-2 Power By:www.300.cn
沪公网安备 31011202012326号
Shanghai Kezhi Electric Automation Co., Ltd
Page view:
Battenberg
概要:
编号
Affiliate classification
111
重量
0.00
零售价
0.00
元
市场价
¥0.00
元
Quantity
-
+
库存
0
产品描述
|
机器人测量先驱
我们的成功
30年前,有一项挑战,即研发可测量品质属性的机器人。
而我们接过了这个挑战,并获得了成功。多年来我们一直着手拓展和完善该技术,这也正式标志着机器人测量技术的开始。
BATTENBERG机器人测量技术结合了硬件(机器人,机器人单元,带抓手的机械臂等),软件和传感器来测量,测试,分析和评估整条生产链中产品的质量属性。
你们的期待
成功的产品在创造和发展的过程中,需要持续的质量检验和评估。提供可验证结果的系统及精确的测量对生产过程来说是至关重要的。
BATTENBERG机器人测量技术在安全可靠的基础上,提供安全的,正确的和有效的质量测量来解答和解决如下的问题和任务:
“我们希望我们的客户能欣赏我们的高品牌价值以及和谐舒适的车辆驾驶舱中内饰的品质。”
“我们如何发现客户是否喜欢以及客户如何评价驾驶舱中的操作元件?”
|
 |
|
机器人测量—灵活的解决方案
精确的质量测试
BATTENBERG机器人测量
使用我们的标准机器人测量系统可以进行测量,可以快速和高效的分析和评估简单或复杂的触觉感知属性。系统可以根据功能需求来扩展视觉,听觉或几何学功能。
我们标准的系统是由以下组件组成的:
● 带控制单元的机器人手臂
● 机器人测量传感器
● 机器人测量软件ROBFLOW
● 带有集成控制器和PC的移动工作站
● 带有测试工作站的基础平台
我们准确和可验证的结果,系统的灵活性和长久稳定性以及我们和客户之间真诚的关系说明了一切。
在全球和国际上,BATTENBERG机器人测量系统被认为是机器人测量系统的基准。
|
 |
足以应对任何类型测试的灵活的软件
我们的核心专长是开发机器人测量工程的软件解决方案,包括所有的分析和评估功能。我们的系统提供的不仅仅是基本的机器人的运动,通过使用智能算法,我们的机器人也能实现在复杂和传感器引导序列下的运动。
易于使用
机器人通过图形编程接口进行编程。使用流程图的方法,客户可以在没有任何特殊的编程语言的基础上调整或开发复杂的机器人程序。系统还可以直接由测试工程师进行编程。在任何时候,更多的传感器,硬件和功能的调整及添加可以轻易的集成到模块化插件系统中。
|
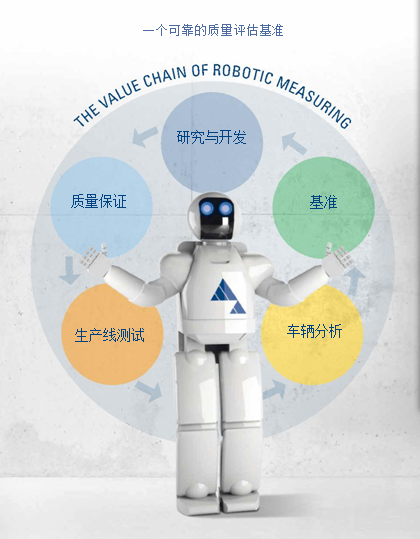
密切关注价值链
机器人测量中的价值链
产品的研发,制造和后续产品的一系列升级需要复杂的测量系统以确保产生稳定可靠的质量评估数据。BATTENBERG机器人测量系统可以用于价值链中的所有层级。我们开发和生产完整的机器人测量系统用来:
● 以优化产品分析和质量保证的质量和功能性测试
● 试验,研究和开发的功能性测试
● 极端气候条件实验室下的功能性测试
● 生产线上线和下线测试
● 驾驶舱内部测量
● 触觉,声觉,视觉和几何质量的操作控制
● 产品质量感知测试,通过心理物理学来测量对产品外观和感觉的主观印象。
我们保证重复性好,可靠的,可验证的测试结果,以及可靠的售后客户技术支持。
|
 |
|
机器人测量 — 全球应用
可靠的质量评估
在公司不同的位置
怎样在全球不同的地点的强制质量测试是可靠的和一致的?
我们的解决方案是Q-BOX。
需求说明书中所描述的每一个测试的规则和偏差被算术的翻译为测试序列和评估方法。然后这些集中保存在Q-Box(质量安全盒)中并可以被所有用户访问。
被授权的用户可以在本地机器人系统中实现Q-Box。
所有的测试自动运行,且结果都保存到Q-Box中,可以被发送至一个中央质量评估系统中。
|
|
 |

|
综合质量评估
成功的品牌和质量策略
差异化评估
全球化产品
现代的产品一般是为全球市场开发和生产的。而国际成功的一个先决条件是密集的产品质量测试。BATTENBERG机器人测量技术提供一个坚实的全球质量策略以确保客观测试结果。
全球化给产品增加了一个进一步的维度:人类主观的判断。一个美国客户对一个产品的反应可能和德国客户有显著的不同。而整合这些不同人的看法和判断到产品测试中是完全全新的挑战。同时在产品开发和评估中提出了新的问题:
● 不同地区和文化领域的个人客户的期望是什么?
● 这些期望是可测量的吗?
● 如何将主观感受客观化?
● 客观评价与主观印象之间的关系如何影响产品的开发?
● 主观的看法与客户的可测量质量属性之间有关联吗?
● 是否有可能预测人类对已知质量属性的感知和评价?
这种新的综合质量评估方法已由BATTENBERG机器人测量技术进行开发,它连接了主观的心理体验至触发的可量化和可测量技术。这种方法是基于人心理物理学的研究,并由此建立质量评价的范式转变规则。它在开发,生产和销售上开辟了新的可能性。
|
 |
|
机器人测量和心理物理学
一辆车的司机的主观感受和车辆的技术规范之间有显著的和可证明的关系吗?
客户更经常购买一个产品基于它的视觉,触觉和听觉而不是其他实际的可测量的技术参数。产品之间可感知的功能性差异越小,则功能性越好,所以更重要的是主观的判断。最终,他们是唯一允许任何类型差异的特性,并随后显著的影响客户的选择。
我们使用心理物理学和实验心理学的综合质量评估来收集主观的判断。由这些方法的创建的特定值与物理属性有关。当这些结果被纳入评估,多维性的主观意见会进行确认。我们使用一个著名的市场研究方法,称之为关联语义差异。
结果表明,可以将主观判断和可预见及有组织的客观物理属性相关联,所以能够根据主观印象的物理属性进行预测。
这种新方法在质量评估中开辟了新的领域。它允许在下面的领域中优化:
● 生产过程链
● 产品质量
● 产品差异化
● 品牌简介
● 客户满意度
|
 |
|
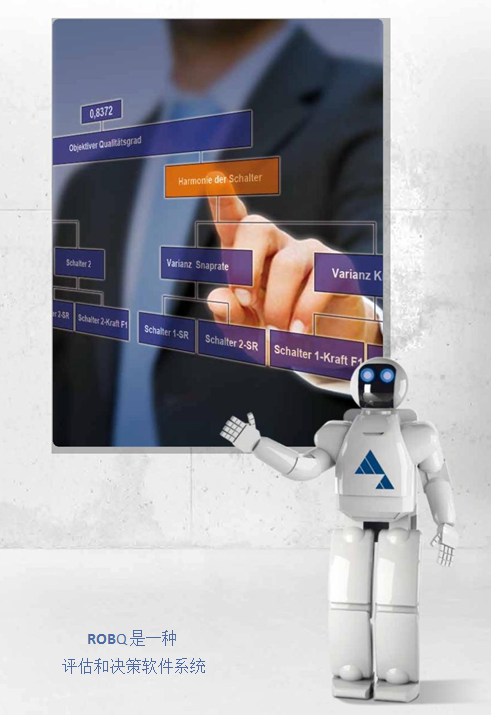
ROBQ – 客观渐进质量评估
客观渐进质量评估
在前面所描述的综合质量评估中,BATTENBERG机器人测量使用其自带的ROBQ软件。
坚信所有属性的可测量质量可以合并到同一个单一的质量图表中引导了ROBQ的发展。在那之后,问题是如何将主观的人类感知和客观的可测量标识相关联,如何将人类的看法预测出客观的测量结果。理想情况下,一个单一的图表可以被用来确保在所有制造地点产品质量的一致性。
我们的ROBQ解决方案是一种评估和决策软件系统。软件中的中央决策树反映了人类的判断是多层次的,比二进制的是/否决策更加复杂。操作流程图的一个基本组成部分是客观的测量标准可被添加,调整和优化,使系统可以模拟人类预测。
0和1之间的质量图表
产品质量描述
产品质量图表描述了0%到100%之间客观质量的标准。
ROBQ集合了可选择功能和决策树中的模糊算子产生的0和1之间的数字的所有标准结果。
产品质量图表透明的描述了产品的质量信息。你能了解到产品确切的质量标准。当产品的所有组件拥有相同的标准,并组装在一个中央位置,你可以确保产品在整个生产设备中目标价值和个人印象。
ROBQ可以被锁定在Q-Box中。使用Q-Box,全球范围内的测量可以进行质量评估并送回至质量保证中央系统。
|
 |
|
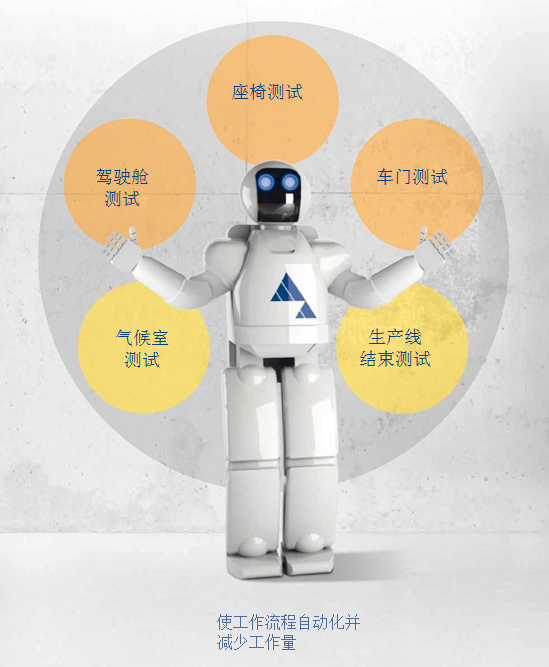
机器人测量 – 应用可扩展
通用的,可扩展的,灵活的,有效的
我们的机器人测量系统不仅仅是测量的机器,其中非常精确的机器人运动学,敏感的传感器,测量技术,透明的测试方法和算法都为您提供不同战略需求以达到您的全球质量目标。
机器人测量有着广泛的应用范围。机器人,传感器和软件的选择是由客户实施的测试规范要求和环境条件决定。
一个通用的可编程测试序列组件软件,能确保迅速的实施或调整测试。
第一个测试组件在室温条件下进行的测试。产品可在气候室的极端气候条件下进行测试,以测试适应环境需求的机器人测量产品。
用于测试在生产线上的100%或随机的样品,机器人测量在一个完整的机器人单元的产线末端使用。汽车内部最终质量测试标志着生产价值链的结束。
机器人测量可以从其他制造商的车辆用来创建基准,使你能够按照自己车型的质量值排序。
机器人测量使用一个自动化的工作流程,降低了工作量的大小。
|
 |

|
驾驶舱测试:触觉-光学-声学
汽车内部测量
驾驶舱的外观,感觉和功能是影响对车辆吸引力的非常重要的质量标准。这同样也严重影响了购买汽车的决定。所有汽车内部集成组件的质量保证是价值链中最后一个能左右客户购买与否的里程碑条件。
BATTENBERG机器人测量可以用来进行全面的内部质量测试。如果测试结果符合预期,那么质量评估就已经完成了;如果不符合,将会与供应商下线评估进行比较。机器人测量系统透明的结果,允许知情的专业人事讨论形成的原因和解决方法,以满足质量目标。
在特定的位置,甚至车辆的内部,会进行一个带有七轴运动学的协作机器人所定义的测量任务。
混合搭配
完整的触觉,视觉,声学和几何标准范围可以通过一个模块化的多传感器机器人中的一个操作序列中进行测试。在机器人手臂上的多适配器可以最多容纳七个具有以下功能的传感器:
● 确认和测量符号的亮度相机
● 表面颜色测量光谱仪
● 测量触觉和触觉质量的压力及扭矩传感器
● 测量轮廓、间隔和缝隙的激光传感器
● 测量活动响声的声学传感器
|
 |
只有使用BATTENBERG机器人测量系统,机器人才能利用自身机器人手臂中的力矩传感器自行定位。
机器人测量成功的一个关键因素是在任何时间朝着表面的方向能够重复机器人垂直的位置。在激光指针的帮助下,光学传感器确定了表面的法线向量,并确定了到对象精确的正交对齐线和距离。
之后,所有的测试都可以按照第一个参考测试进行像素精确定位。
|
ROBTOUCH-像素位置和触摸屏反应验证
这种机器人测量系统通过电阻式,电容式和红外式为触摸面板提供了菜单,功能列表和测试信号。
在触摸板被自动定位后,机器人将触碰显示屏上期望的像素点位置或按照预定路径移动。屏幕的反应可以被测量,而触碰位置可以从CAN消息中筛选出。
折线
复杂的触碰路径和相应的触碰可以生成并测试触摸屏的反应。测试过程中,来自CAN消息中关于位置坐标x,y和该触碰区域手指的大小尺寸的信息将被使用。
ROBPROXIMITY
为了红外线控制显示,BATTENBERG提供了一个利用测试指针而设置的测试。指针来自于不同的位置,当指针第一次注册时,显示屏的红外传感器将起反应。所有坐标点被存储于CAN消息中并可以在三维云中可视化显示。
带触觉反馈的触摸屏
触摸屏技术越来越成为控制和驾驶舱显示的标准。带触觉反馈的触觉敏感表面感觉是像真正的按钮。以现代显示器,结合了真实按钮和灵活触摸屏的优点。
风格和夜景设计
由Technoteam研发的亮度相机LMK用来测量内饰风格和夜景设计的亮度和颜色。结合深层次的传感器和集成到Robflow中的软件,机器人可以进行触觉的和直观的编程。机器人使用一种新的视觉测试来自动获取和定位表面上要进行测量的点。用户无需在手动计划测量点,它能保证预定义的LMK测试安全进行。
|
 |
|
座椅测试 - 安全性舒适性测试
安全性舒适性
座椅不同于其他任何车辆元素,它能影响到舒适性和安全性。好的座椅能在完美的支撑住一个乘客,并能在长时间的驾驶中保持舒适性。座椅的位置能通过集成控制,容易的调整以适应不同乘客。同时,座椅的形状能在可能造成的碰撞中保护乘客避免受伤。为确保这些苛刻的需求,一系列的测试与预定的规则是必要的。这些措施包括:
● 控制机制功能
● 座椅舒适性
● 形状(特别是乘客安全性)
● 座椅长期使用的元素
由BATTENBERG机器人测量技术提供的设置,带有高负载和三轴力矩传感器机械手的机器人。根据测试,专用工具和/或假人可以适应要求并进行进一步的测试。许多进一步的测试都是在气候室的极端气候条件下进行的。
头枕安全特性
BATTENBERG机器人测量有专利权的靠背设置(头部)测量,符合美国强制FMVSS 202a法规标准,以测试假人测量头的后部和头枕之间的距离。它已被证明,在两个车辆碰撞时两者之间一个很小的距离能显著降低猛烈撞击的风险。
|
 |
座椅舒适度和耐久性
座椅硬度的定义,即选择测试的位置(光栅测量)处,座椅有多硬是座椅舒适度的一个重要标准。在座椅表面标记的位置进行测量和可视化分析,用来查看如何分散能量以及座椅压痕路径如何表现。
机器人测量采用了一种新的视觉测试,来对座椅表面的点进行自动查找和定位。用户不需要在手动设置编程的点。座椅调节功能测试是由具有复杂运动和适应性测量的机器人进行的。经过一段时间的座椅进入/离开耐久性测试。在测试过程中,座椅形状的变形被机器人的适应性运动和机器人测量所抵消。
|
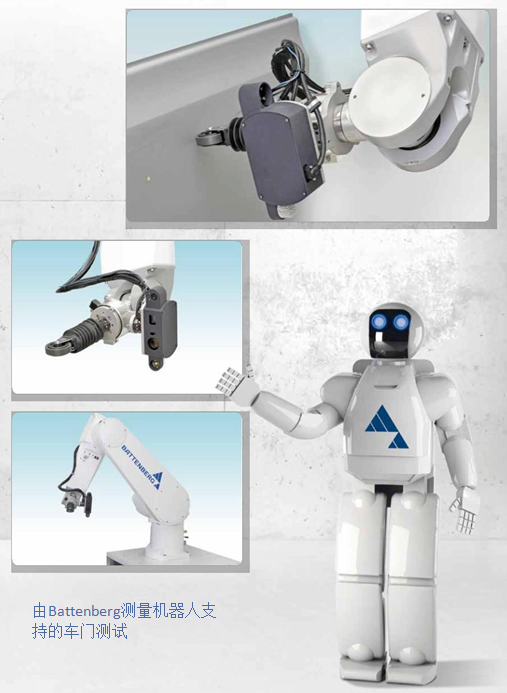
车门测试 – 实验室和制造过程
车门是否正确关闭?
使用BATTENBERG机器人测量技术,机器人可以通过关闭车门这一重复动作与智能传感器监控到的各方面测试结果,测试车门的功能性。
关闭能量和关闭速度
适应性力矩传感器允许机器人以预定义的力度和确定的速度关闭车门,并直接测试压力值。通过同时开关车门,机器人可以测量完整的车门压力角度曲线。
生产线结束时车门测试
优化最终测试
生产流水线上一个有趣的应用是一个预定义的力和位置摔门试验,比如从第一个止动器位置开始确认该门已经正确的关闭。此外,传感器可以通过车门的动作独立的测量出车门速度角度曲线。这是一项特别有趣的开发,它不是关于车门的关闭曲线,而是以预定义速度关闭车门所需的最小能量。
实验室自动编程
该系统可以装备能自动学习重复关闭车门动作的智能传感器,而不需要有计划的指定复杂的机器人运动曲线。
机器人应该关门的位置是被标记的。传感器在视野范围内可以“看到”标记,并在机器人坐标系统中计算出坐标。总共做了三个不同车门的位置。用于机器人关闭车门的角度可以自动和直接的定义。整个过程只需要几分钟。
|
 |
|
线体终点测试达到零缺陷
制造的产品有多好?
零缺陷和质量目标的实现是每一个制造组件的绝对目标。所有组件都需要达到最高的质量标准,已消除可能的投诉和故障。
一个里程碑是在生产线末端的一个安全机器人单元内所有质量标准的测试和评估。
在BATTENBERG机器人测量单元中所有触觉,视觉和听觉的元器件以生产线的速度水平进行测试。制造的产品可以由员工手动移动或直接自动移动至处理单元。所有的测试都是按照协议被记录和可视化进行的。
如果一个组件测试失败,错误日志将被创建,该组件将被从生产线中移除或禁止使用。生成组件的详细错误分析,使错误能够被准备的识别且去除造成的原因。
所有国际区域的机器人单元测量结果可以提供给中央质量保证系统。
 |
|

|
极端条件下测试
极端环境模拟,功能确保
极端气候条件下的可靠性和质量测试是产品开发的重要组成部分。BATTENBERG机器人测量技术可在气候室中模拟极端环境条件,并给出透明和可靠的功能质量测试结果。
气候室可视化
机器人有其自己的空调,并且是不腐蚀的不透明的,能在气候室的极端温度下保护它。这种保护使得它不能被直观的记录机器人的精确位置。这使得规划和执行在气候室中的测试序列更加困难。为了克服这个困难,当进行机器人视觉软件ROBVISU编程时,以3D效果显示了中枢位置,并允许进行动作仿真模拟。
通常许多组件必须放置在气候室中,在一个测试过程中,所有组件都是可获得的。ROBVISU允许用户将自己的测试设备和记录合并至视频中(wave格式)。
不同条件下结果比较
为了能够比较从室温和气候室中的结果,测试序列必须是相同的。这是机器人的另一项优点。测试序列是可交换的,并通过一个特殊的校准位置消除偏差,以确保这两个测试的测量位置完全相同。
|
 |
|
更多应用
信息娱乐
特别是在操作上有高度的用户交互的消费者的通知和娱乐设备上。这些设备要求最佳的功能性测试结果和用户舒适度。我们的机器人可以用于触觉测试,以及画面识别,电子和其他性质的广播音响系统,导航系统,电脑主板以及这些组合。我们理想的解决方案是RobEOL。
通信技术
对于大多数人来说,移动通信设备是必不可少的,无论私用或商用。智能手机和平板电脑,特别的需要目标和精确的测量,以确保最佳的质量。机器人测量提供了大量的测试—包括在气候室的极端气候条件。
医疗技术
医疗技术是考虑到功能性,触觉和视觉质量,有严格标准的功能。我们的机器人测量技术用来提供仪器设备(注射泵,输液泵和胰岛素喷头)所需的操作力和和视觉属性。
航空航天
除了用测试证明对安全组件坚持严格的法规外,在民用航空领域其他测试也变的越来越重要。这包括有乘客使用和操作的所有元素的质量。我们的机器人提供飞行中音频和视频要求的操作力和其他属性的精确读数,包括乘客座椅和头部隔离间隙等。
|
 |
光学
对光学设备的调整和释放机制的质量要求已变得越来越重要。在运动和相机光学中,精确和同步的触觉处理是强制的。我们的机器人测量系统可以精确测量所有按钮,表盘,快门,镜头(摄影)和光学瞄准镜的操作力和其他属性。
| > SIEMENS | > GE Digital | > Ordinal |
| > Wente | > Ubudu | > MDT |
| > Battenberg | > CM |
Key words
Previous article
CM
MDT
Next article
No content information display available